Tipp 205: Positioniertisch - Die Bauanleitung
3D Druck
Drucken Sie alle Kunststoffteile mit der Bezeichnung 3D_01 bis 3D_14 (siehe Tabelle S1 und 3D Design Dateien in den Supplements der Originalpublikation: http://dx.doi.org/10.1016/j.bios.2016.10.078) mit einem 3D-Drucker Ihrer Wahl. Wir verwendeten den Drucker Replicator Dual der Firma MakerBot mit Standardeinstellungen (ABS 1,75 mm, Schichtdicke: 0,2 mm zusammen). Der Füllungsparameter für den Druck sollte auf ≥30% gesetzt werden, um eine ausreichende Stabilität der gedruckten Teile zu gewährleisten. Der Zeitaufwand zum Drucken der Bauteile beträgt je nach Drucker etwa 24 Stunden.
Gewinde schneiden
Schneiden Sie alle Gewinde, wie in den Zeichnungen in der Datei 'Module A-E.pdf' der Supplements in der Originalpublikation angegeben. Vorbohren der Gewinde ist nicht notwendig.
Verkabelung und Verbindungsstecker
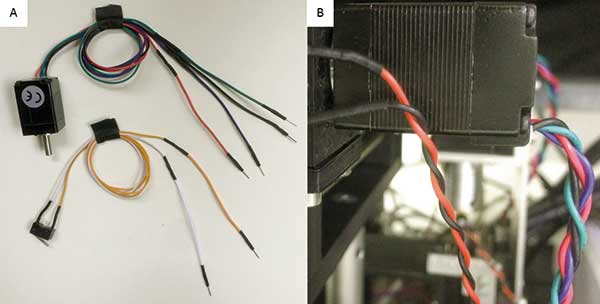
Löten Sie isolierte, flexible und farblich unterschiedliche Kupferdrähte (~1 mm Durchmesser, ~500 mm Länge) an die äußeren Anschlüsse der Mikroschalter (ME_02, siehe Abb. 1A). Wir empfehlen jeweils gleiche Kabelfarben, etwa für Plus- und Minuspole, um Fehler bei der Verkabelung zu vermeiden. Für eine Verbindung der Endschalter mit den Anschlussbuchsen auf dem Arduino-Ansteuerungsmodul sollten lose Kabelenden mit Steckern ausgestattet werden. Wir haben hierzu Kabelbrücken oder sogenannte Jumperkabel (ME_13), die vom Hersteller mit Steckern ausgestattet sind, in der Mitte zerschnitten und an die Mikroschalter gelötet. Auf die gleiche Weise versahen wir Kabelenden der Schrittmotoren (ME_01) mit Steckern (siehe Abb. 1A). Isolieren Sie alle verlöteten Enden mit Schrumpfschläuchen, um Kurzschlüsse zu verhindern.
Die Schrittmotoren werden durch ein externes Netzteil mit Strom versorgt, das über zwei Buchsen auf dem Steuermodul angeschlossen wird. Wenn Sie ein Netzteil beschaffen, sollten Sie gleichzeitig auch eine Verbindungsbuchse kaufen, die in die Steckbuchsen der Steuerplatine passt.
Montage von Modul A
Montieren Sie Modul A, wie in der Bauanleitung im Dokument 'Modul A.pdf' beschrieben.
Montage von Modul B und Modul C
Montieren Sie Modul B und Modul C, wie in den Bauanleitungen in den Dokumenten 'Modul B.pdf' und 'Modul C.pdf' beschrieben. Aufgrund von Ungenauigkeiten der gedruckten Teile, einschließlich der Halterung der Gewindestangen und Kupplungen, sind die Schrittmotoren und Gewindestangen nicht-zentrisch montiert. Gewindestangen und Motoren führen hierdurch im Betrieb eine radiale Wipp-Bewegung aus. Um ein Verkeilen der beweglichen Teile zu verhindern, empfehlen wir, die Schrittmotoren mit zwei diagonal gegenüberliegenden Schrauben (anstatt mit vier Schrauben) am Positioniertisch zu befestigen. „Kabelsalat“ lässt sich vermeiden, wenn man die angelöteten Kabel der Bauteile, wie in Abb. 1B dargestellt, verdrillt.
Montage von Modul D und Modul E
Montieren Sie Modul D und Modul E, wie in den Bauanleitungen in den Dokumenten 'Modul D.pdf' und 'Modul E.pdf' beschrieben.
Herstellung gedruckter Leiterbahnen (PCBs)
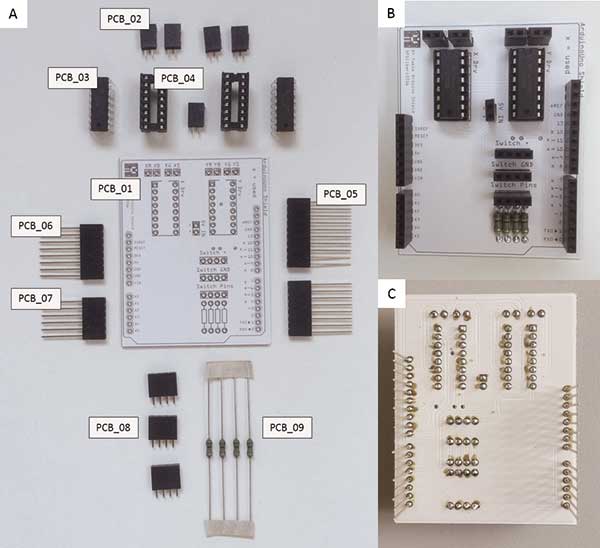
Die Steuerplatine (siehe Abb. 2) wurde mit der Software Fritzing erstellt. Eine Schemadatei der Platine mit der Bezeichnung PCB_Stepper.fzz ist im Fritzing-Dateiformat bei den Zusatzdateien (Supplements) zu finden und kann mit der Fritzing-Software betrachtet, beziehungsweise modifiziert werden (http://fritzing.org/home/, Installationsanleitung siehe http://fritzing.org/download/#install). Die Software ermöglicht auch die Erteilung eines Produktionsauftrags (Weiterleitung auf http://fab.fritzing.org/fritzing-fab).
Um Arbeitszeit und Kosten zu sparen, kann die Platine auch durch eine Steckplatine ersetzt werden. Hierzu bietet die Software Fritzing eine entsprechende Ansicht, die durch Öffnen der Datei PCB_Stepper.fzz zugänglich ist.
Löten der elektronischen Komponenten auf die Steuerplatine
Löten Sie alle Teile mit den Bezeichnungen PCB_02 und PCB_04-09 auf die unbestückte Platine (PCB_01, Abb. 2A), wie in Abb. 2B und C gezeigt, und setzen Sie anschließend die L293DNE H-Schrittmotortreiber (PCB_03) in korrekter Orientierung (U-förmige Einbuchtung auf Chip und Sockel weisen in dieselbe Richtung) in die Sockel (PCB_04).
Verkabelung
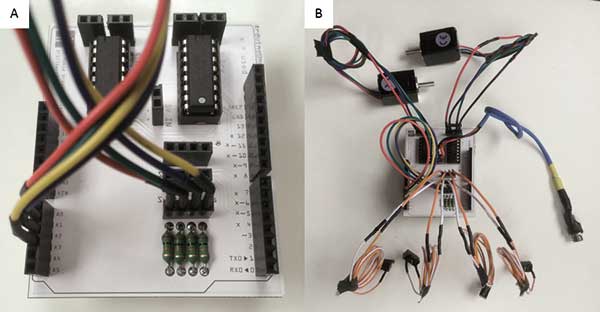
Verbinden Sie auf der Platine die Endschalter-Eingänge (Switch Pins) mit den Analog-Eingängen A0-A3 mit Kabelbrücken (ME_11) wie in Abb. 3A dargestellt. Verbinden Sie anschließend die farbigen Kabel der Schrittmotoren mit den entsprechend bezeichneten Eingängen der Platine XR (X-Achse, rotes Kabel), XB (X-Achse blaues Kabel), XG (X-Achse grünes Kabel) und XS (X-Achse schwarzes Kabel) sowie YR, YB, YG und YS. Schließen Sie die Kabel der Endschalter an die Eingänge „Switch +” und „Switch GND” auf der Platine an und verbinden eine 5V-Gleichstromquelle mit dem 5V-IN-Eingang auf der Platine (spannungsführendes Kabel mit Plus und Nullleiter mit Minus verbinden, siehe Abb. 3B).
Installation der Arduino IDE und Inbetriebnahme der Steuerplatine
Laden Sie die neuste Version der Arduino IDE aus dem Internet (https://www.arduino.cc/en/Main/Software) herunter und befolgen Sie die Installationsanweisungen (https://www.arduino.cc/en/Guide/Windows). Starten Sie die Software nach abgeschlossener Installation, und verbinden Sie das Arduino UNO Board (zunächst ohne aufgesetzte Steuerplatine) mit einem USB Kabel mit dem Computer. Klicken Sie im Menü „Tools” auf den Eintrag „Board” und wählen „Arduino Uno” aus. Klicken Sie anschließend im gleichen Untermenü auf den Eintrag „Port” und wählen denjenigen COM Port aus, der dem Arduino Uno Board durch das Betriebssystem zugewiesen wurde. Nach der Etablierung einer Verbindung zwischen dem Computer und dem Board, wird im unteren rechten Eck der Arduino IDE-Benutzeroberfläche die Meldung „Arduino UNO on Port…“ angezeigt.
Verwendung des Positioniertisches mit Hilfe der Arduino IDE
Übertragen Sie den in den Zusatzdateien (Supplements) bereitgestellten Steuerungs-Programmcode (sketch) mit der Bezeichnung „String_Control.ino“ auf das Arduino Uno Board. Öffnen Sie hierzu die Datei in der Arduino IDE (File > Open… > String_Control.ino -> Upload). Wenn die Datei erfolgreich übertragen wurde, erscheint am unteren Rand der Arduino IDE-Benutzeroberfläche die Meldung „Uploading completed“.
Verbinden Sie die Steuerplatine mit dem Arduino Uno Board und schließen die Stromquelle für die Schrittmotoren an. Nun kann der Positioniertisch mit Textbefehlen über den Serial Monitor angesteuert werden. Starten Sie hierfür den Serial Monitor durch Klicken auf den Eintrag „Serial Monitor” im „Tools”-Menü. Tippen Sie Befehle in dem Textfeld am oberen Rand des Fensters im folgenden Format ein: Schritte in X-Richtung, Schritte in Y-Richtung (z.B. 200,200 oder -200,-200), um beide Motoren um 200 Schritte, also eine Umdrehung, in positiver oder negativer Richtung zu bewegen. Durch Klicken auf die Schaltfläche „Send” wird der Befehl ausgeführt.
Weitere Beispielprogramme zur Ansteuerung von Schrittmotoren sind im Menü unter File > Examples > Stepper (zum Beispiel stepper_oneStepAtATime.ino) zu finden. Detaillierte Programmieranleitungen, weitere Beispielprogramme und Befehlslisten finden Sie auf der Arduino Homepage unter https://www.arduino.cc
Benutzen der Positionierungsplattform mit LabVIEW
Übertragen Sie den Sketch mit dem Namen LV_Control.ino auf das Arduino Uno Board. Die Vorgehensweise ist hierbei dieselbe wie unter „Verwendung des Positioniertischs...“ Der für die Kontrolle des Tisches relevante Programmcode befindet sich in den Reitern LV_Control und LabVIEWInterface, die Bestandteil des Sketchs sind. LV_Control enthält Informationen über eingebundene Programmbibliotheken und die Konfigurationsinformationen des Arduino Boards, wie zum Beispiel die Anzahl der Schritte pro Umdrehung oder welche Anschlüsse zur Steuerung der Schrittmotoren verwendet werden sollen. LabVIEWInterface enthält Programmcode für die Kommunikation von LabVIEW mit dem Arduino Board. LabVIEW-Befehle werden mit Hilfe spezieller, sogenannter case-Funktionen, ausgeführt.
In dem unten dargestellten Beispiel soll der Schrittmotor um einen Schritt bewegt werden:
case 0x41:
myStepper1.setSpeed(200);
myStepper1.step(1);
break.
Hierbei definiert „case 0x41” die Funktion, die durch einen Hexadezimalwert (hier 0x41 = 65 in dezimal) definiert ist. Die Zeile „myStepper1.setSpeed(200)“ legt die Geschwindigkeit des Schrittmotors (Stepper1) in Schritten pro Sekunde (200) fest und myStepper1.step(1) gibt die Anzahl der auszuführenden Schritte vor. Die „break”-Anweisung markiert das Ende der Funktion. Die Funktion wird durch das SendRecieve.vi der LabVIEW Interface for Arduino-Programmpallette an das Arduino Board gesendet. Das LabVIEW-Interface für Arduino ist hier zu finden: http://www.ni.com/gate/gb/GB_EVALTLKTLVARDIO/US. Installationsanweisungen und Infos gibt es hier http://digital.ni.com/public.nsf/allkb/A20FBBD36820669086257886004D5F4D, hier https://decibel.ni.com/content/groups/labview-interface-for-arduino oder hier https://www.labviewmakerhub.com/.
Öffnen Sie nach erfolgreicher Installation die Datei XY_Stage.vi mit LabVIEW 2014 (oder neuer). Wählen Sie auf der Benutzeroberfläche der Software im Aufklappmenü Arduino Uno COM Port # denjenigen COM-Anschluss aus, der dem Board vom Betriebssystem zugewiesen wurde.
Wählen Sie die Schrittweite (in µm) mit Hilfe des Aufklappmenüs „Step Width (µm)” aus und starten das Programm durch Klicken auf den weißen Pfeil (Startknopf) in der oberen linken Ecke der Anwendung. Bewegen Sie den Tisch durch Betätigen der Schaltfläche X-Axis LEFT, X-Axis RIGHT, Y-Axis LEFT oder Y-Axis RIGHT. Um das Programm zu beenden, klicken Sie auf die STOP-Schaltfläche.
Wichtig:
Schließen Sie die Anwendung nicht durch Klicken des roten Stoppknopfs am oberen Rand des Hauptmenüs. Hierdurch wird die Software daran gehindert, die aktive Verbindung mit dem Arduino Board zu trennen, wodurch nach einem Neustart des Programms keine weitere Kommunikationsverbindung hergestellt werden kann, weil die aktuelle Verbindung noch besteht. Für den Fall, dass die Software nicht ordnungsgemäß beendet wurde, sollte die Kommunikationsverbindung manuell beendet werden. Wir haben hierzu die Software Stop_COM.vi bereitgestellt. Öffnen Sie das Programm, wählen Sie den COM Anschluss aus, der dem Arduino Board zugewiesenen wurde, und führen Sie das Programm einmal wie oben beschrieben aus. XY_Stage.vi kann nun wieder ordnungsgemäß ausgeführt werden.
Dominik Schneidereit & Daniel F. Gilbert
Und hier geht es zum Übersichtsartikel...
Letzte Änderungen: 29.03.2017