Pipettierhilfe für jedermann (und -frau)
(28.07.2021) Was erhält man, wenn man die Hände aufeinanderlegt und die Arme waagrecht anwinkelt? Das Grunddesign eines gelenkigen Pipettierroboters aus dem 3D-Drucker.
Ein Roboter ohne viel Schnickschnack aber mit „Fingerspitzengefühl“ könnte im Laboralltag allerhand Pipettierarbeit abnehmen. In der Industrie gehören Pipettierroboter, die unermüdlich immer die gleichen Handgriffe ausüben, quasi zum Personal. In akademischen Laboren sind es aber meist die Forscher selbst, die diesen mühsamen Job erledigen. Dies liegt zum einen am fehlenden Kleingeld oder Platz für Pipettierautomaten. Für viele Labore sind sie aber auch zu unflexibel, etwa wenn die pipettierten Volumina sowie die Form und Größe von Reaktionsgefäßen häufig wechseln oder unterschiedliche Inkubationszeiten eingehalten werden müssen.
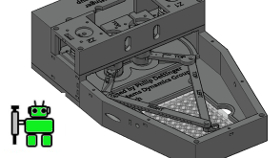
Timm Schröders Mannschaft an der ETH Zürich überlegte sich, wie ein flexibler, platzsparender und kostengünstiger Pipettierroboter aussehen müsste, der Forschern insbesondere Pipettieraufgaben rund um Zellkultur und Live Cell Imaging abnehmen kann. Die Lösung der Schweizer ist genauso elegant wie ungewöhnlich: Der Pipettierkopf ihres Pipetting Helper Imaging Lid Robots (PHIL) bewegt sich nicht wie üblich entlang kartesischer Achsen – er wird vielmehr von einem sogenannten Fünfgelenk mit zwei kürzeren (65 Millimeter) und zwei längeren (145 Millimeter) Armen an die gewünschte Position geleitet (siehe Bild).
Alles für 600 Euro
Um sich ein Fünfgelenk vorzustellen, muss man nur die Hände übereinanderlegen und davon ausgehen, dass sie mit einem Gelenk verbunden sind. Die vier weiteren Gelenke sind dann Ellenbogen- und Schultergelenke. Diese Konstruktion spart Platz und erleichtert zudem den Zusammenbau von PHIL mithilfe handelsüblicher Komponenten, die mit Bauteilen aus dem 3D-Drucker kombiniert werden und insgesamt nur knapp 600 Euro kosten.
PHIL ist so klein (20 x 30 Zentimeter) und leicht (950 Gramm), dass man ihn direkt über eine Multiwell-Platte auf dem Objekttisch eines Mikroskops platzieren kann. Die Bewegung des Fünfgelenks erfolgt durch zwei rotierende Schrittmotoren im Schultergelenk der beiden kurzen Arme. Je nachdem, welcher Motor sich dreht, bewegt sich der Pipettierkopf an der Spitze der beiden langen Arme in die gewünschte Position. Zwei zusätzliche Schrittmotoren heben oder senken die Arme mithilfe einer 3D-gedruckten Schraube.
Bis zu neun verschiedene Flüssigkeiten
Die zu pipettierende Flüssigkeit fördern Peristaltikpumpen aus Vorratsbehältern über Teflonschläuche zu einem wiederverwendbaren dünnen Röhrchen aus Edelstahl am Ende des Fünfgelenks. Der Roboterarm wird zunächst mithilfe der Schrauben etwas über die Probenplatte angehoben und danach in die gewünschte Well-Position bewegt, in die die Flüssigkeit entleert wird. Statt nur eines Pipettierröhrchens können bis zu zehn am Ende des Fünfgelenks fixiert werden. Ein Röhrchen ist für die Aspiration von Restflüssigkeiten vorgesehen, die anderen neun für das Pipettieren. Da jedes der maximal neun Pipettierröhrchen an einen individuellen Teflonschlauch angeschlossen ist und aus einem anderen Flüssigkeitsbehälter gespeist wird, ist es möglich, bis zu neun verschiedene Flüssigkeiten zu kombinieren. Die Fließgeschwindigkeit kann zwischen zwei und hundert Mikrolitern pro Sekunde betragen und lässt sich durch separat programmierte Peristaltikpumpen für jede Flüssigkeit separat einstellen.
Die Programmierung von PHIL ist nach den Angaben der Schweizer Gruppe intuitiv und auch für unerfahrene Anwender problemlos möglich. Zur Inbetriebnahme wird der Roboter zunächst kalibriert, um das Flüssigkeitsvolumen über die Pumpaktivität klar zu definieren. Der Nutzer kann sämtliche individuellen Parameter in eine entsprechende Excel-Datei laden und darin festlegen, wie viel Flüssigkeit über welches Pipettierröhrchen in den einzelnen Wells einer 6-, 24-, 96- oder 384-Well-Platte landen soll. Nach dem Pipettieren durchläuft PHIL ein vorprogrammiertes Spülprogramm mit achtzigprozentigem Ethanol und destilliertem Wasser. Anschließend werden die Teflonschläuche durch rückwärts laufende Peristaltikpumpen getrocknet.
Sanftes Pipettieren
Wie sich PHIL bei der Arbeit mit Zellkulturen schlägt, untersuchte Schröders Team bei der Immunfärbung von blutbildenden Stammzellen oder Geweben. Das Abgeben und Absaugen von Flüssigkeiten erledigte der Roboter ohne Fehler, Kreuzkontaminationen traten keine auf. Während beim manuellen Pipettieren etliche Zellen bei den Waschschritten verloren gingen (12,6 Prozent), waren die Verluste mit PHIL erheblich geringer (3,6 Prozent). Auch bei der Kultivierung embryonaler Stammzellen in 96-Well-Platten pipettierte PHIL die Medien so sanft, dass die Zellen sich normal entwickelten und sich nicht von der Stelle rührten.
Wer PHIL nachbauen will, findet sämtliche Bauanleitungen, 3D-Druckanweisungen und Programme zur Bedienung frei zugänglich auf der Webseite der Gruppe und zwar hier.
Andrea Pitzschke
Dettinger P. et al. (2021): Open-source personal pipetting robots with live-cell incubation and microscopy compatibility. bioRxiv, DOI: 10.1101/2021.07.04.448641
Bild: Schröder Lab